M140 | |
| La Mesa Indexadora Rotativa modelo M140 está indicada para pequeñas aplicaciones que no requieren carga muy pesada. Compacta y ligera, puede ser fácilmente instalada, fijando 4 tornillos en ella. Puede instalarse horizontalmente, vertical o invertida (cabeza hacia abajo).Ideal para aplicaciones como: – Grabación láser – Remaches – Montajes – Tampografía – Serigrafía | |
 | |
Características técnicas | |
| Diámetro del plato giratorio | 140 mm |
| Diámetro del agujero pasante: | 12 mm (agujero con desvio de 15º) |
| Dirección de rotación: | Manejillas del reloj, contra las manejillas del reloj o alternando ambas |
| Cantidad de pasos por giro: | Came indexado: 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 20, 21, 22, 24, 26, 27, 28, 30, 32, 33, 36 (otros bajo consulta), o Came contínuo |
| Tensión del motor: | 220 V / 380 V / 440 V |
| Frecuencia del motor: | 50 Hz / 60 Hz |
| Potencia del motor: | 0.09 hasta 0.25 KW |
| Peso sin motorreductor: | aprox. 12 Kg |
| Peso con motorreductor: | aprox. 16 Kg (varía según el motorreductor aplicado) |
| Precisión de las paradas: | ±0.020 mm en raio de centro de 50 mm |
| Repetibilidad de las paradas: | ±0.010 mm en raio de centro de 50 mm |
| Sensor inductivo: | PNP NA (10 ~ 36 V) |
CargasPara dimensionar cuál es el modelo que se utilizará en su proyecto, es necesario conocer más allá de las cargas, también el momento de inercia de la pieza que será movido, el tiempo en segundos para el posicionamiento y la cantidad de estaciones (paradas). Ejemplo: Momento de inercia 12Km2, velocidad 1.5 segundos, 12 estaciones. Haga clic en el menú Presupuesto o en contacto con nosotros para ayudar a identificar estos datos. | ||
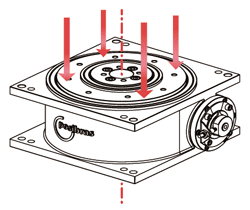 | A- Carga máxima vertical distribuida uniforme sobre el plato giratorio – o peso total (*) – La carga máxima total se refiere a las fuerzas en el plato giratorio. Esto no significa que la mesa indexadora pueda girar dicha masa, pues que la rotación depende de tres factores:
| 400 Kg |
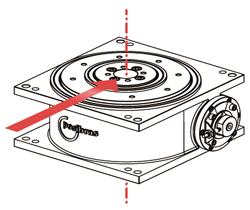 | B- Carga máxima radial: Representa las fuerzas perpendiculares al centro de la plato giratorio, generalmente ejercidas por actuadores fuera de la mesa indexadora, alineadas con el centro del plato | 200 Kg |
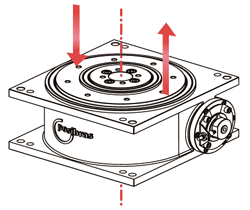 | C- Torque máximo vertical: Representa el desequilibrio de masas en el plato giratorio, o la torsión de este plato giratorio generalmente causada por actuadores fuera de la mesa indexadora que ejercen fuerza axial en un solo lado del plato giratorio | 500 Nm |
 | D- Torque máximo horizontal: Representa fuerzas externas en la dirección de rotación de la mesa indexadora, lo que obliga al plato a girar o frenar | 110 hasta 400 Nm |
Principales dimensiones
en milímetros (*) – Las medidas pueden variar según el motorreductor adjunto a la mesa indexadora (**) – Solo en M140, a 32 mm por debajo del inicio del agujero pasante hay una desviación de 15 ° |
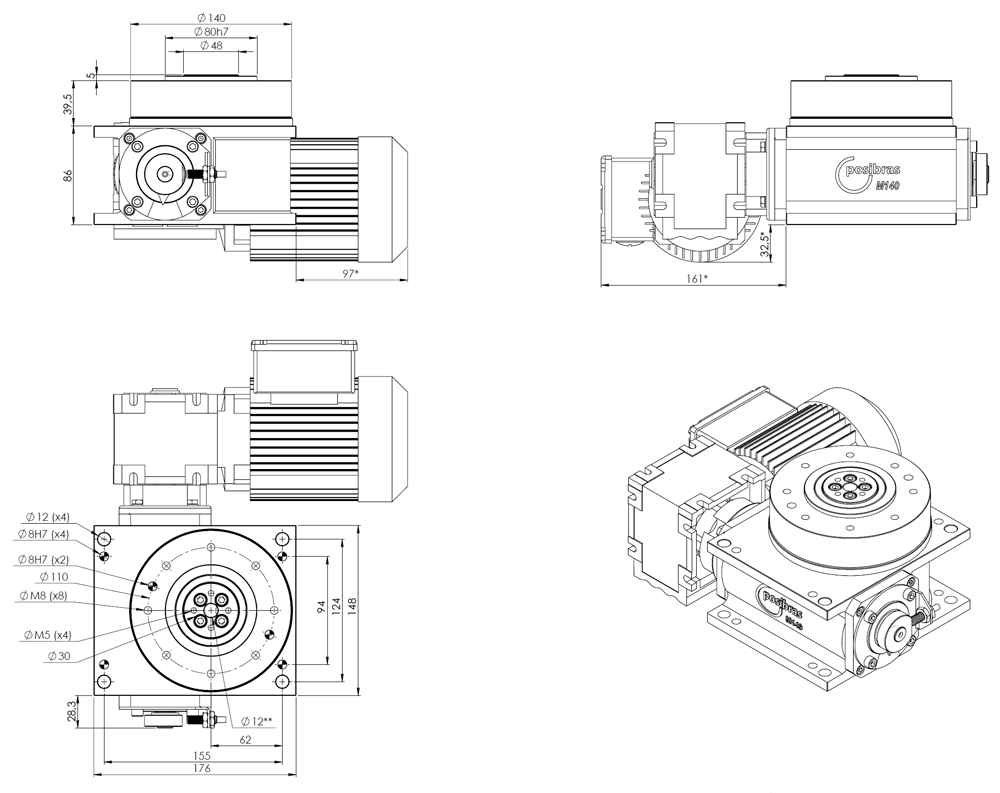 M140 Principais dimensões
M140 Principais dimensõesPosición de montaje del motorreductor
|

Download del manual de instrucciones – haga clic en el ícone abajo |


